Category: Vectors
-
Four-vectors and conservation laws in relativity
This lecture was delivered to the final year honors class of 3 year science degree students on 21 November 2017 as part of the Classical Dynamics paper. In this lecture we will discuss some of the important tools of relativistic mechanics. We will discuss the idea of proper-time, 4-velocity, 4-acceleration, 4-momentum, 4-force and related conservation…
-

Relativistic Doppler effect
Relativistic Doppler effect. There is an apparent shift in the observed frequency of any electromagnetic wave (light) when there is any relative motion between the source of light and the observer. This can be easily determined by using the 4-vector formulation of theory of relativity. Lets discuss the details of this phenomena under two situations.…
-

Wrong question in GATE 2018 physics?
I think the above question asked in GATE 2018 (physics) is wrong. Any vector has two components. The component perpendicular to the parity axis has even parity and the parallel component to the axis has odd parity. The opposite is true for axial vectors. E, A vectors. B, L axial vectors. The correct answer per…
-
Cross and Dot product of vectors.
Someone asked a very interesting question on the role of vectors in Physics. He was curious to know if dot product of vectors is natural but vector product is just syncretism, — that is make shift or unnatural manipulation. Every vector can be resolved into two components. The cosine and sine components (any two vectors…
-
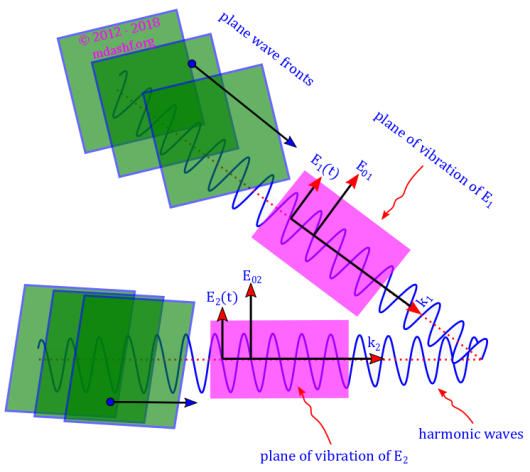
Interference of two plane harmonic waves
Optics Series Lecture, Lecture – VII. “Conditions of interference, Interference of two plane harmonic waves.” This lecture was delivered on 7th February in a lecture session of 1 and 1/2 hours. This lecture was delivered to Physics elective students but intended as a lecture towards Honors students at a later date. Electromagnetic Waves. Light is…
