Tag: refraction
-
Matrix formulation in geometrical optics
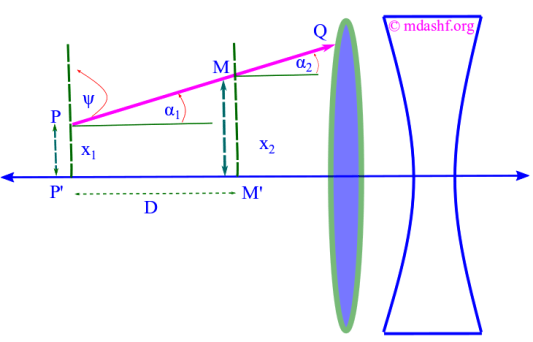
Topics covered in this lecture Ray tracing a. Translation matrix b. Refraction matrix c. System matrix In this lecture, we will discuss about one of the most interesting and powerful methods in Geometrical Optics. As we have discussed here (https://mdashf.org/2017/02/25/fermats-principle-a-lecture-in-optics/), geometrical optics is that segment of optics in which we are limited to a situation…
-

Fermat’s Principle, a lecture in optics
Optics series lecture, Lecture-III “Geometrical Optics and Fermat’s Principle”. Geometric Optics: When the size of objects that a wave of light interacts with are large compared to the wavelength of light λ, λ can be neglected for practical purposes and the light waves behave like rays of light. Rays of light are geometric line segments…
