Optics series, lecture — V
This is the 5th lecture for the physics honors class, delivered on 3rd February 2017.
( All Optics series lectures ) Read other available lectures in optics series
“Matrix formulation in geometrical optics”
In this lecture we will learn about
a. Translation matrix
b. Refraction matrix
c. System matrix
In this lecture, we will discuss about one of the most interesting and powerful methods in geometrical optics. As we have discussed in lecture — III, geometrical optics is that segment of optics in which we are limited to a situation when the wavelength of light is negligible, eg 
We will learn a great deal of detail about what exactly the light wave is, in the future lectures of this series. Many of these are already available in this website, e.g. see the second link below.
( lecture — III ) Read to know more about “geometric optics”
( Waves ) Read about light as wave
As a consequence light ( waves ) can be considered as rays or geometrical straight lines and the nuances of light as wave undulations can be postponed to a happy hour.
Ray tracing
In the geometric optics limit any general optical system can be associated with a ray which can be traced through two basic types of traversal of the ray: translation and refraction. The law of refraction is therefore the central tool for ray-tracing. A ray can be described in an optical system by its coordinates. We will soon define the ray coordinates.
Our goal is to find the matrix which governs the displacement of the ray from one coordinate to another coordinate, as the ray travels from one geometric point to another. This will enable us to study simple as well as much more complicated systems in the most effective and powerful way as we will see.
Lets discuss the basic matrices available for ray tracing when the ray travels from one coordinate to another in the following two cases.
- I. Translation matrix
- translation matrix is relevant when light travels in a straight line motion in a homogeneous medium
- II. Refraction matrix
- refraction matrix is relevant for refraction occurring at the interface of two different media
In general therefore the net traversals of the ray can constitute of any number of translations and any number of refraction. A reflection would merely be two translations and a general refraction can be construed from a refraction as well as a translation as we will see.
A most generalized optical system can therefore have 

I. Translation matrix
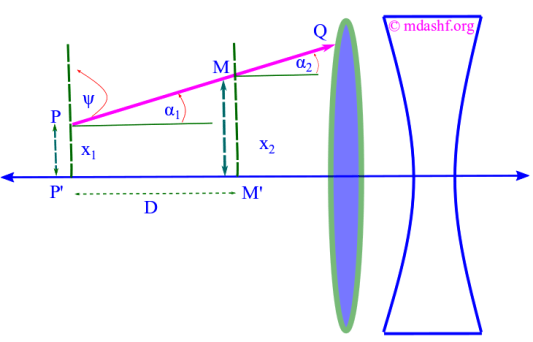
Lets us consider a ray that traverses an optical medium in a straight line, at any angle. This is called as a translation, as the only change the ray undergoes is a translation or straight-line shifting of coordinates. Needless to say this enforces us to realize the ray is limited to a single homogeneous medium.
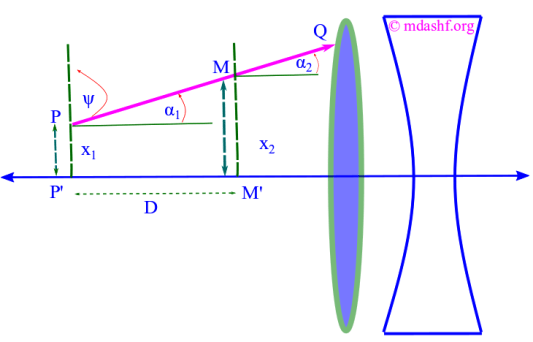
Note that in the above diagram we have shown two different lenses, translation matrix will help us only as far as point Q. We will need further formulation ( refraction matrix ) to be able to see whats going to happen inside of one or more than one lens or any other kind of optical media.
The ray would be completely characterized if we could specify the required number of coordinates of the ray, howsoever complicated it is. In our case it is simple, a straight-line. Therefore we need to specify coordinates of any two points to completely specify our ray.
At any one geometric point on the ray, its coordinate is specified by two variables; height 






We defined our ray at two points — hence defined it completely, by specifying two coordinates ( height and angle are the coordinates of the ray ) — at two different geometric points ( P and M are the geometric points of the ray ): i.e. by the coordinates ( of the ray ) 

We define another convenient variable, the optical direction cosine
( How optical path is defined? ) Click to learn more about optical path
The refractive index 

In our figure shown above the ray moves in a straight line in a homogeneous medium hence 





( What is paraxial region? ) click to see what paraxial region means
Again since our medium is homogeneous 



The expressions in 

Thus a ray at coordinate 


The actual distance traveled by the ray in the homogeneous medium is approximated by 

II. Refraction matrix
We determined the form of a matrix that would be responsible to carry a ray from its initial coordinate to its final coordinate if the traversal of the ray under consideration is in a single homogeneous medium and follows a straight line.
A more involved process is that in which the ray gets refracted upon meeting the interface of two media with different refractive indices. By analyzing the traversal of the ray we can determine the matrix that governs the ray traversal for refraction. Accordingly we call it a refraction matrix.
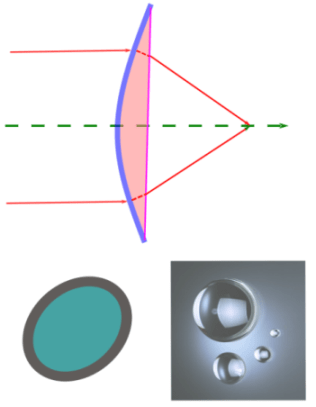
Lets draw a suitable diagram for this situation. We will consider a single refracting surface and leave any further configuration of the surface unaddressed. So we can later extend towards configurations which can have various thickness and different secondary surfaces, after the single surface on left which is spherical with a curvature of radius 

Since the ray now traverses two media while getting refracted at the interfaces of the media we should invoke the Snell’s law in order to constrain the path of the ray.
In addition we are adamant on the paraxial traversal of the ray, that is the ray keeps as close to the optical axis as possible, in height as well as angle, hence sin of angles etc will be approximated to the value of the angles itself, given the angles are already stated in terms of radian consistently.
a. the Snell’s law is given by 

Also we write the relations between angles as shown in the above diagram so that we can express everything in terms of our previously defined ray coordinates, in terms of 
So we have 



Our paraxial assumption means 




If we define 


Now we note that the height of the ray at point-P before and after the refraction is the same so: 



III. System matrix
In general any optical system is made-up of a series of refracting and translating motions of a ray. We can thus write a general matrix which transforms the coordinates from one point of the configuration to another, under our paraxial assumption.




This implies that the elements of the system matrix in general satisfy the condition 



The matrix in this form is also called the ABCD matrix owing to the symbols of the elements, 

Leave a comment