Problems In General Physics, I.E. Irodov, Part-I Physical Fundamentals in Mechanics
Chapter 1.1 Kinematics
10 interesting problems in elementary mechanics
This post intends to provide 40 interesting problems in elementary mechanics from IE Irodov, Problems in general physics that I solved in last couple weeks.
Note that another 30 problems — additional 12 at hand, which has been solved will be uploaded after they are scanned, shortly.

Basic Concepts
In this class today we will discuss the subject of “kinematics” briefly and solve some problems, based on the same.
The motion of objects are studied under the heading “mechanics“.
a. Mechanics is called “kinematics” if we study about the “nature of motion” without regard to what factors are causing such motion.
b. In addition to kinematics, when we focus our attention to study the factors that cause motion, such is named as dynamics.
In kinematics today we will discuss a few problems that will cover the topics of
A. Relative velocity —

B. Average velocity —

C. Motion under uniform acceleration — 
D. Position and velocity as vector —

E. Resolving a vector into components —

A. Relative velocity
Lets begin by briefly discussing the case of relative velocity of two objects which are either
a. moving along in one direction at given velocities, or
b. are moving in opposite directions, making an angle of 
Lets say object A is moving with velocity 

We would consider only the scalar magnitudes of these vectors 


As seen here
We like to know at what velocity B is moving with respect to a frame fixed onto A — which is moving at
Its easy to see that wrt B, A is moving at a speed given by 


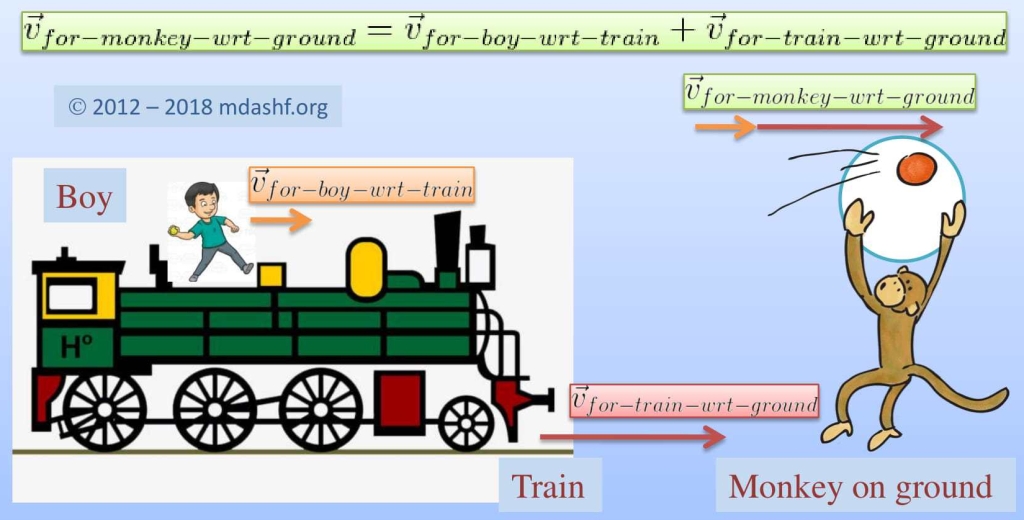
Train and ball example
If a train is moving at a speed of
wrt platform and in the train a ball is thrown along the motion of the train at a speed of
wrt ground — here platform, we can see that:

In other words the ball has been thrown at a speed of 

a. We say the motion is relative.
b. Such addition of velocities are known as Galilean relativity, velocity addition — of Newtonian or Galilean mechanics, or simply relative velocity.
c. All vectors, not just velocity vectors add up under such conditions of relative motion.
d. If the ball were to be thrown along the direction of the train’s motion at lets say 
Now lets solve a real life problem.
Problem 1 — Irodov 1.1
A motorboat going downstream overcomes a raft at a point A;
later it turned back and after sometime passed the raft at a distance
from the point A.
Find the flow velocity assuming the duty of the engine to be constant.
Answer to Problem 1
Lets first understand the problem.
The raft is something which is assisted by the flow-velocity of the water;
so, 
The motor boat can have its own speed 
a. Downstream: 
b. Upstream:

The raft has traveled 


 should be shown from starting point (A, unmarked) to B. Not from C to B.
should be shown from starting point (A, unmarked) to B. Not from C to B.So 
From 


⇒ 


So 


B. Average velocity
Now let us consider the idea of average velocity and average acceleration.
a. We define average velocity as the total displacement divided by total time taken. Its a vector quantity which is not accurate if motion is non-uniform.

b. For uniform motion, in 1-dimension, average velocity gives a scalar magnitude which is called as average speed.
c. Displacement is a vector which is the difference of two position vectors.

d. Distance is the scalar magnitude of displacement if we consider uniform speed along 1-dimension: 
e. By uniform we mean covering of an equal distance in an equal interval of time. This means speed is constant.
So average speed is total distance covered divided by total time taken for covering the distance.

Average acceleration
In the same way we define “average acceleration“.
Acceleration is a vector given by the total change in velocity vector in a given interval of time.
Thus


C. Motion under uniform acceleration — equations of motion
a. For a motion where, acceleration is constant or uniform, we can derive a set of relation called as “kinematic relations” or “equations of motion“.
b. Lets do so in the 1-dimensional uniform acceleration case. We only state the results here, without derivation.



Now lets solve two problems based on the above.
Problem 2 — Irodov 1.2
A point traversed half the distance with a velocity
. The remaining part of the distance was covered with velocity
for half the time, and with velocity
for the other half of time.
Find the mean velocity of the point averaged over the whole time of motion.
Answer to problem 1.2

In the first leg of the journey, point moves from A to B, at speed 


So 
For second leg of the journey, i.e., B to C and C to D; 
or 
From 
![t' + t =x[ \frac{1}{2v_0}+\frac{1}{v_1+v_2}]](https://s0.wp.com/latex.php?latex=t%27+%2B+t+%3Dx%5B+%5Cfrac%7B1%7D%7B2v_0%7D%2B%5Cfrac%7B1%7D%7Bv_1%2Bv_2%7D%5D&bg=ffffff&fg=cd5c5c&s=1&c=20201002)
or 
so 
Problem 3 — Irodov 1.3
A car starts moving rectilinearly, first with acceleration
— with initial velocity zero, then uniformly and finally decelerating at the same rate
, comes to a stop.
The total time of motion equals
. The average velocity during that time is equal to
. How long does the car move uniformly?
Answer to problem 1.3
We should get a final answer: ![\boxed{t_2^2 = \tau^2 [1-\frac{4}{a\tau}], \, t_2 = 15s}](https://s0.wp.com/latex.php?latex=%5Cboxed%7Bt_2%5E2+%3D+%5Ctau%5E2+%5B1-%5Cfrac%7B4%7D%7Ba%5Ctau%7D%5D%2C+%5C%2C+t_2+%3D+15s%7D&bg=ffffff&fg=cd5c5c&s=1&c=20201002)
Lets see how.
Lets implement the kinematic relations for the three legs of the journey represented by the times 
Leg 1: 
Leg 2: 
Leg 3: 
Now let us apply another kinematic relation, for the 3rd phase — or leg of the journey, represented by time 

⇒ 

Now 


So, 





Thus, 
We have 
This gives 
D. Position and velocity as vectors
Motion of objects are described by vectors, we defined position vector 

Lets illustrate this by a problem.
Problem 4 — Irodov 1.5
Two particles 1 and 2 move with constant velocities
and
. At the initial moment their radius vectors are equal to
and
.
How are these 4 vectors to be related for the particles to collide.
Answer to Problem 4 — Irodov 1.5
For two objects to collide their relative velocity must occur in the direction of their relative displacement. The vectors make it into a one-dimension like condition, where collision occurs if the objects move towards each other in the same direction.
Lets cast the problem into the following diagram.

Evidently the condition of collision is satisfied when:
which is a shorthand for 
E. Resolving a vector into its components
Physical quantities can be expressed as vectors. Vectors are important mathematical tools. We state couple results that relate two vectors — components, to their resultant vector.

A. Law of cosines
The magnitude of resultant of two vectors is given as follows.

B. Law of sines
The angle made by resultant R with component A is given by 

Lets employ this important result to see how useful it is towards “everyday” life.
Problem 5 — Irodov 1.6
A ship moves along the equator to the east with velocity
. The south-eastern wind blows at an angle
to the equator with velocity
.
Find the wind velocity
relative to the ship and the angle
between the equator and the wind direction in the reference frame fixed to the ship.
Answer to problem 5 — Irodov 1.6





Problem 6 — Irodov 1.7
Two swimmers leave point A on one bank of the river to reach point B lying right across on the other bank. One of them crosses the river along the straight line AB while the other swims at right angles to the stream and then walks the distance, that he has been carried away by the stream to get to point B.
What was the velocity
of his walking if both swimmers reached the destination simultaneously? The stream velocity
and the velocity
.
Answer to problem 6 — Irodov 1.7
Notes
A. Answer stated in Irodov is 
B. Derivation is given in solution manual from A.K. Singh
C. We will derive in another fashion — without looking into A.K. Singh, this you can call method by M. Dash, the author of the present discourse.
D. If we recast 

E. Understand carefully the concept of relative velocity — eg when taking ratio of sides in the diagram, do not use values from two different frames of references. We will use “wrt ground frame” eg.
Lets begin with a diagram, I will explain the parameters and the details of the steps.
Here is the required diagram.

Person M goes along AD, drifts to B simultaneously — due to 





So 

Concept of relative velocity: resultant vectors of “velocities wrt water” and velocity of water wrt ground.

Person M would take time 

Person N would similarly take time 

This excess time is used by N to cover distance CB so that M and N reach point B simultaneously. — Time
Now let us solve the problem from this much information.

Note that 

Also ground speed of M is 



Thus we have two equations.

Thus we get 
From 




From 

or 
So, ![\frac{BC}{t_1-t_3} = \frac{AB}{BC}\big[ \frac{2.5\cos\theta}{\cos\theta -1} \big] \hspace{15pt} eq^n\,(7)](https://s0.wp.com/latex.php?latex=%5Cfrac%7BBC%7D%7Bt_1-t_3%7D+%3D+%5Cfrac%7BAB%7D%7BBC%7D%5Cbig%5B%C2%A0+%5Cfrac%7B2.5%5Ccos%5Ctheta%7D%7B%5Ccos%5Ctheta+-1%7D%C2%A0%5Cbig%5D+%5Chspace%7B15pt%7D+eq%5En%5C%2C%287%29&bg=ffffff&fg=cd5c5c&s=1&c=20201002)
From 
![u=\frac{BC}{t_1-t_3} = \frac{2}{2.5}\big[ \frac{2.5\times 3/5}{3/5 -1} \big]=3.0 \,\frac{km}{hour}](https://s0.wp.com/latex.php?latex=u%3D%5Cfrac%7BBC%7D%7Bt_1-t_3%7D+%3D+%5Cfrac%7B2%7D%7B2.5%7D%5Cbig%5B%C2%A0+%5Cfrac%7B2.5%5Ctimes+3%2F5%7D%7B3%2F5+-1%7D%C2%A0%5Cbig%5D%3D3.0+%5C%2C%5Cfrac%7Bkm%7D%7Bhour%7D&bg=ffffff&fg=cd5c5c&s=1&c=20201002)
Note that AB is covered at speed wrt water. BC is covered at speed of water wrt ground.
That’s the answer.
Problem 7 — Irodov 1.8
Two boats, A and B, move away from a buoy anchored at the middle of a river along the mutually perpendicular straight lines: the boat A along the river, and the boat B across the river. Having moved off an equal distance from the buoy the boats returned.
Find the ratio of time of motion of boats
if the velocity of each boat with respect to water is
times greater than the stream velocity.
Answer to problem 7 — Irodov 1.8

The situation is described above. For boat A, it goes assisted by stream velocity and comes opposed by it, both for distance 
Boat B on the other hand goes at an angle with the stream velocity so drift of the stream brings the motion perpendicular — 
It’s reverse motion has the same resultant or relative velocity wrt the ground.
Note that G represents wrt ground based frame and W represents wrt water-flow based frame.
Now let us solve the problem: 



So

For B, 

So, 
Boat A is late wrt Boat B for the travel of same distance 
Problem 8 — Irodov 1.9
A boat moves relative to water with a velocity which is
times less than the river flow velocity.
At what angle to the stream direction must the boat move to minimize drifting?
Answer to problem 8 — Irodov 1.9
a. Our answer is: 
b. I derive this answer in a totally different method from what A.K.Singh has worked out. Singh uses minimization rule i.e. he sets derivative to zero. I use the direct relative velocity rule — i.e. law of sines for relative velocity, check a few pages above.
Lets begin by the diagram.

We instantly realize that “minimum drifting” is nothing but a direction which is 
Lets use law of sines with this in mind.
Law of sines; 






We realize that 




Also 

Use this into law of sines and the fact that 

⇒

⇒ 

Thus the boat must make an angle 
Problem 9 — Irodov 1.10
Two bodies were thrown simultaneously from the same point: one straight up and the other at an angle of
to the horizontal. The initial velocity of each body is equal to
.
Neglecting the air-drag, find the distance between the bodies,
later.
Answer to Problem 9 — Irodov 1.10
Let us first describe the given problem in terms of a simple diagram.


![S = \sqrt{ [S_y(B)-S_y(A) ]^2+S_x(A)^2}=\sqrt{(v_0 \sin \theta ' t)^2+[v_0t(1-\cos\theta ')]^2}](https://s0.wp.com/latex.php?latex=S+%3D+%5Csqrt%7B+%5BS_y%28B%29-S_y%28A%29+%5D%5E2%2BS_x%28A%29%5E2%7D%3D%5Csqrt%7B%28v_0+%5Csin+%5Ctheta+%27+t%29%5E2%2B%5Bv_0t%281-%5Ccos%5Ctheta+%27%29%5D%5E2%7D&bg=ffffff&fg=cd5c5c&s=1&c=20201002)

Using given values the answer is:

Problem 10 — Irodov 1.11
Two particle move in a uniform gravitational field with an acceleration
. At the initial moment the particles were located at one point and moved with velocities
horizontally in opposite directions.
Find the distance between the particles at the moment when their velocity vectors become mutually perpendicular.
Answer to problem 10 — Irodov 1.11
I have developed a concise method for this problem — after scribbling unsuccessfully for many pages.
Lets begin with a diagram.

The velocities 


In a time 

Let us apply “law of sines” to the congruent Δs — traingles.

⇒ 

The distance between the particles are: 
Using the given values: 

Leave a comment