“Coriolis Force”
The article is 5.34 K worded.
I have been thinking of writing a basic introduction, on this important physical concept — of, what’s known as a Coriolis force.
It is one of the interesting ideas of physics, which does not get as much of a mention perhaps, unless you just happen to know this, because of your advance footing, in the discourses of physics.
This is perhaps so because its two orders of magnitude smaller, in its strength, compared to relevant forces, in a situation, that involves this small — but a significantly measurable force.
So, what’s a Coriolis Force?
I presume that most of us would be aware of, what’s a centrifugal force. Its in this context, that, a Coriolis force is most understandable.
So, what’s a centrifugal force?
A Centrifugal force, comes into picture, every time a centripetal force comes into consideration. A centrifugal force is the corresponding pseudo-force, of a centripetal force. So, for every centripetal force there would be a corresponding centrifugal force.
So, we need to shed light on a few things, before we understand, what is a Coriolis force. We need to, therefore, discuss; what are pseudo forces and what’s a centripetal or a centrifugal force, then a Coriolis force would be clearer, to the root.
So lets begin with force.
Force has a basic standing in physics, in connection to, in what frames of reference we need to measure such a physical quantity, as are all other physical quantities to be measured, have a significance, as to in what frames of reference we are measuring those quantities in.
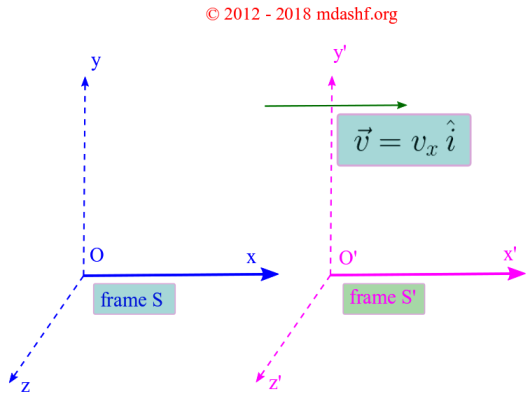
Frames of references represent the velocity vector
So what are frames of references and why are they important?
Frames of references are usually a set of 3 perpendicular axes, imagined to be attached, to a body, wrt which an observer makes his measurements of physical quantities. If a car is moving on a road, one can attach, such a 3-axes system, to the body of the car — or even to an object, on the road, that’s not moving.
In other words, the set of axes, will have a velocity or speed of zero, if the axes is attached to an object that’s not moving.

Consequently, a set of axes, has a speed v, if its attached to a body — that’s moving at that speed. So the frame of reference, is going to inherit the speed of the object, that it is attached to.
As a consequence, a frame of reference, is nothing but an imaginary set of axes, that has an assigned value of speed v. — v stands for velocity, although in a lose sense, because it can provide the value of speed while direction information can be consistent with the larger picture of the description of the problem.


Needless to say, the frame of reference as a set of imaginary axes, with an assigned value of velocity, is the most general definition of a frame of reference, since this speed or velocity v; can be zero, can be increasing or decreasing, can themselves be rotating.
That is, the vector associated with the speed or velocity can be a function of time, in such a way, that, the tip of the arrow will show different angles, wrt the set of axes.
Rotation of a frame of reference is represented simply by a velocity vector, associated with the frame, which is doing the same thing as the frame.

Since the velocity of the frame of reference, is a generally possible value, in its magnitude and direction, one can say a frame of reference is simply an arbitrarily possible value of a vector, namely the velocity vector, associated with the frame.

Thus you, I or any privileged physicist, will have the hindsight, to associate this velocity, to any object, in the surrounding that he or she thinks is suitable, for his purposes of measurements.
So if NASA or ISRO is sending a space voyage, the most generally possible “velocity of the earth” would serve as a good definition of a frame of reference.

A frame of reference would then no longer be, any different technically, from the velocity of the earth, howsoever its possible.
This can only become more and more general, if we keep on arguing, why earth’s velocity can itself be measured from a multitude of other objects in space.

This “other objects in space” can be, the center of the solar system, or the fairly distant star. Depending therefore on the generality of the velocity of the earth, the frame of reference, will have more or less precision associated with it, for a particular measurement, to be carried out.
Eg, one may neglect the spin — or self-rotation of the earth, in certain earthbound measurements.



E.g. for a train jostling between Nebraska and its nearby city of Hullabulla, someone may not deem it relevant, to consider earth’s spin velocity, into the frame of reference that someone chooses, for determining the train’s speed.
But in certain measurements, such as the flight touring from NY city to Hamburg, one might consider it a significant effect, to include the speed of self-rotation of earth, which is about half-a-km-per-second.


So, the concept of a frame of reference as nothing but merely a velocity vector, is one of the most generally available definitions of such. Given we see what’s a frame of reference, the next question is what bothered a lot of Physicists.
What are the most basic type of frames of reference?
There are two.
One would be where Newton’s laws would be valid. These are called as; inertial frames of reference.
The other would be where the Newton’s laws would be valid only if we make a small correction to the physical quantities. These are called as; non-inertial frames of reference.
Newton was certainly lucky, that, Newton’s laws were made to retain their sanctity, by slightly changing the nature or definition of quantities — put a little more salt, okay now its good.
This becomes more and more difficult, as we pass along the generation, from Newton to Einstein and then from Einstein to Feynman or Bohr.
They each make the best in their times, but when we fall back to the past to ordain some corrections, to any lingering misunderstanding or inconsistencies, in their theories or understanding, we face bigger and bigger challenges, because the laws themselves have become more and more precise, fulfilling, complicated and self-serving.
So when Bohr’s model was corrected, it was no more a simple trick, but generations of most intelligent scientists harking back and forth among themselves, in the most intellectual rigor possible, the very ideas, which were refined not just by a dint of technical innovation or heuristic, but also the most uncanny philosophical moorings.
An example in mind of the intellectual rigor and uncanny philosophical moorings is the famous debate between Bohr and Einstein about the validity of quantum mechanics as a general law of nature.

A photon is released as per predictions of Bohr’s model when an electron changes its orbit from a higher energy level to a lower one. In the above image, the initial state sub-scripted by index i is the higher energy level and the final state sub-scripted by the index f is the lower energy level. The energy of the photon is given by: ![E_{photon} = h \nu = E_i - E_f = \frac{2\pi^2 me^4}{h^2}\Big[ \frac{1}{n_f^2}-\frac{1}{n_i^2}\Big] = +13.6 \Big[ \frac{1}{n_f^2}-\frac{1}{n_i^2}\Big] \,eV](https://s0.wp.com/latex.php?latex=E_%7Bphoton%7D+%3D+h+%5Cnu+%3D+E_i+-+E_f+%3D+%5Cfrac%7B2%5Cpi%5E2+me%5E4%7D%7Bh%5E2%7D%5CBig%5B+%5Cfrac%7B1%7D%7Bn_f%5E2%7D-%5Cfrac%7B1%7D%7Bn_i%5E2%7D%5CBig%5D+%3D+%2B13.6+%5CBig%5B+%5Cfrac%7B1%7D%7Bn_f%5E2%7D-%5Cfrac%7B1%7D%7Bn_i%5E2%7D%5CBig%5D+%5C%2CeV&bg=ffffff&fg=000&s=0&c=20201002)
Bohr’s model, while correct explained only the hydrogen like configuration. Bohr’s model met the same fate, as that of Newton’s laws; at the hands of its successors.
Schrodinger’s, Heisenberg’s and Pauli’s more universal principles, were needed to see why Bohr’s model was just a necessary consequence, but not the completely correct answer to the quantum world.
We not only stand on the shoulder of giants, but at times we remodel their shoulders so that they become more and more suitable, for our purposes. Sometimes we have to make them into staircases and take them again and again, to prove our point.
We will now discuss in detail one by one the following concepts which bear significant conceptual relation among each other and to our discussion of the topic of Coriolis force as well.
A. Inertial frames of reference
B. Newton’s 3 laws
C. Central and non-central forces
D. Strong and weak form of Newton’s 3rd law
E. Principle of angular momentum and momentum conservation
F. Early unification
So the type of frame of reference where Newton’s laws as they were formulated by Newton, are valid are called as inertial frames of reference. Since I told you a frame of reference is nothing but exclusively a particular definition of a suitable velocity; this means that the inertial frames are frames that are defined by associating them with bodies that move at any uniform velocity.
An inertial frame of reference “is” an uniform velocity. An uniform velocity is one, that does not change its direction or speed. An unchanging speed or direction is thus the only characteristic of a Newtonian or inertial frame of reference — lets abbreviate the inertial frame of reference as IFR.
So an inertial frame of reference is one where both Newton’s 1st and 2nd law are valid.
The first law; objects tend to keep their direction and speed, as long as there are no external agent causing them to change the same. We say objects have their inertia.
The second law; the rate of change of momentum of an object is nothing but that external agent and is called as a force. — The second law also has another important and in some sense exclusive definition; the force is mass times the acceleration.
The third law; the force acted onto a body — by another body, will always meet an exactly opposite force, produced by the body that experiences the force, if one is called as action the other is called as reaction. Thus for every action there is an equal and opposite reaction force.
The first and the second law are valid in the frame of reference in which the velocity of the frame of reference is not changing or uniform. Such a frame is defined to be an inertial frame.
Thus strictly speaking an inertial frame is one where Newton’s first and second law are valid, without further modification of the quantities or their relationship, present in these laws.
— Note: strictly speaking its the first law which is a special case of the second law, hence there is only one law involved here, the second law.
A relationship between physical quantities is often called as a law if such a relation is an experimentally observed phenomenon in nature.
The 3rd law has two forms, in which the law can be stated.
One of these is of a more general form. It is called as a weak form of the law.
The other is less general or more strict. It is called, for that reason, a strong form of the law.
Lets play some semantics to analogize what we mean by the semantics weak and strong, before we see what they mean in the context of the physical concepts that we are discussing.
Weak law; you are not allowed to move outside.
Strong law; you are not only not allowed to move outside, but also you are to cook a meal while you are inside.
In a similar fashion >>
Weak form of Newton’s third law; forces of interaction between two exclusive bodies, are equal and opposite.
Strong form of Newton’s third law; forces of interaction between two exclusive bodies, are not only equal and opposite but also directed along — that is parallel or anti-parallel, to the line joining the centers of the point bodies that are interacting.
Consequently the forces are also called for the same reason; central forces, if they satisfy the strong form of the 3rd law.
I not only pull you, but also I pull you toward my center and not in another unattractive fashion.
One example of such central forces is therefore the force of gravity. The apple in the absence of wind and other dissipation factors, will fall exactly straight to the ground, because that’s the radial direction joining to the center of the earth.
If gravity were not central, the apple upon falling, would trace a path which is going to be off the straight-down.
So in that scenario, we can happily sit under the apple tree, unmindful of gravity.
If physical analogy to worldly affairs is your forte, I make it a little resilient by this comparison. Love is not a central force, because of my attraction my paramour is attracted towards someone else. Love is the reason why my attraction towards others, causes them to avoid me, love originates non-centrally for me.
Evidently not all forces are central hence they do not obey the strong form of Newton’s third law always. Also its possible by ordinary forces such as magnetic forces to disobey both the weak and strong forms of Newton’s third law. As a consequence, they disobey principle of momentum and angular momentum conservation.
Forces can be made to be disciplined by generalizing these force quantities and their existent relations called as laws in some consistent fashion. For magnetic forces this is done by recognizing that, there is an additional form of angular momentum that’s inherent in magnetic forces.
But the central forces and weak and strong form of Newton’s third law have nothing to do with the inertial and non-inertial frames, just that these are two different examples, of how methods are applied to Newton’s laws to make them more and more universal.
So sometimes we have to readjust either the quantities and, or — their inherent internal relationships, called as laws, to make them more universal. Both of these have been done to Newton’s laws to preserve their universality.
Example 1; inclusion of pseudo force into the formalism, a quantity is redefined to establish the “universal” validity of Newton’s laws.
Example 2; redefinition of angular momentum into the formalism to re-establish the law of conservation of momentum and angular momentum.
This is also a good example of what’s meant by unification in physical laws. The enactment of universal validity into physical laws by making them more consistent, called as unification, is a general attribute of physical understanding.
Two of the unification strategies have been performed to Newton’s laws. The first one, which we will discuss in a bit more detail, is the simplest of its kind.
So we recapitulate and discuss some more interesting concepts.
The inertial frame is nothing but a uniform or unchanging velocity — associated with an arbitrary object of choice. Under such a condition Newton’s first and second law do not throw exceptions — throwing exceptions is not only the language of software programming but early day physics.
I don’t know when it was made sure that Newton’s laws can be recast by redefining quantities in it to preserve its sanctity when frames of references are altered. Some amount of historical perspective is a must when we are to have a better grasp of any subject of study.
The non-inertial frames or changing velocities are what make the Newton’s first and second law behave a little awry. The first and second law are not exactly valid, in such frames. It’s a pseudonym to call forces in non-inertial frames as “inertial forces”, its misleading as these forces are not being considered in an inertial frame, while all we are considering is a non-inertial frame.
Of-course non-inertial frames and inertial frames come hand-in-hand with each other in many physical situations but that does not remove the confusion. They should rather be called as “forces from inertial consideration” because if anything the forces exist irrespective of what frame we are choosing to carry the measurement.
These forces might just not retain the same value in one frame that they do in another. So the forces present in the inertial frame are also active in the non-inertial frame. But there are effects in the non-inertial frame that these forces would not explain, if we are to utilize the Newton’s first and second law — or with added conditions of consistencies and generalities the 3rd law as well.
These non-inertial effects would seem to be coming from nowhere, but these are present when the frame from which we are measuring the physical phenomena is having a velocity that is changing with the change in the instant of time, a reason and definition of calling such frames as non-inertial frames.
The velocity can change in two ways since it has only two parameters the magnitude and the direction. When magnitude changes we say the object is speeding up or slowing down and this change is always so due to a force, that’s the essence of Newton’s first law and the second law is telling us exactly how this happens.
Speeding up is called as acceleration and slowing down is deceleration but in general both are called as acceleration because acceleration is a vector and has two parameters. The change in direction of velocity is also regarded as a change due to acceleration, as acceleration has a direction which tells us how the velocity vector will change its direction.
All in all we say when velocity a vector is changing — which is a change in the inertia of an object that is, its due to presence of an acceleration and acceleration has two parameters, magnitude and direction. So all change in velocity vector its direction or magnitude are due to an acceleration.
The acceleration is what gives us exactly how much is the force — the agent that causes such a change as contained in Newton’s second law. Recall that we had stated the second law in two exclusive forms.
a. rate of change of momentum is the force and also
b. mass times acceleration is the force
Its for the above reason that a non-inertial frame is also called as an accelerated frame of reference. Without acceleration the velocity — or state of inertia, would not change.
Hence >>
a. an inertial frame is an uniform velocity or zero acceleration frame and
b. a non-inertial frame is a nonuniform velocity or accelerated — that is, non-zero acceleration frame.
Pseudo Forces
Some complicacy comes into play in the accelerated or non-inertial frame — again a non-inertial frame is where the state of inertia — that is the velocity ( associated with the frame and not object velocity whose motion we are interested in studying ), is changing.
The complicacy is there are effects to be observed in such frames which are not understandable as such from the presence of forces in the inertial frame — forces of inertial consideration — in literature these forces are misleadingly called as “inertial forces”, and what Newton’s 3 laws say these forces of inertial consideration do.
The extra effects are thus called as pseudo effects. These pseudo effects can be understood in the non-inertial frames only-if they are associated with the non-inertial condition — that is, condition; the state of the inertia of the frame of reference is changing.
Since this is caused by acceleration of the frame of reference the clue is to formulate a force that really does not exist but effectively brings back Newton’s laws into consistency, in explaining these effects.
All we need to do is consider a new hypothetical force as opposed to taking a real existing force — also known as “forces of inertial consideration” or as per literature “inertial forces” — which are always real.
These new kind of forces, the non-real ones are then equal and opposite to the acceleration vector — multiplied by the mass of the object that would experience such an effect.
These forces are thus called as pseudo forces. A pseudo force depends on what accelerating frame we consider. A pseudo force is not an actual force and merely hypothetical, it reinstates the sanctity of Newton’s laws, which were broken — because the frame of reference is being accelerated.
We must be cautious in choosing the mass which is the mass of the object that is experiencing the effect. That’s not all. The pseudo force also depends on the state of inertia of the object whose motion we are considering in that non-inertial frame. Again by state of inertia we mean the velocity vector.
Many times authors due to plain-speak mean mass when they say inertia, that’s only part of the problem and not the whole problem. The whole problem is the velocity vector and where we are measuring that velocity from. Welcome to physics because that vantage where we are measuring velocity from gives the acceleration vector and so on.
So the effect that we would call as pseudo-force effect has 3 factors that decide what this force is going to be.
a. The acceleration of the frame of reference, 
b. The mass of the object on which we are considering the effect, m — this is a scalar.
c. The state of inertia or actual velocity — and therefore acceleration of the object in that accelerated frame — and not another frame accelerated or not, notwithstanding, let’s say 

Now to go back to simplicity let’s imagine a stone attached to the end of a string. Earth around sun is also the near analogue to such a thing a satellite thrown to Mars is such a thing and so on in their near analogy. So the spherical cow or logical umbrella analogy in physics is not quite worthless.


There are two situations. We describe them in A and B.
A. the situation one; this situation shows up when looking at the string and stone being rotated from a place — which is itself not moving.
The state of inertia of that place therefore entails it to behave like an ideal inertial or uniform velocity frame whereas the string and stone do not have an uniform velocity it’s the frame whose attribute is central to the definition of the inertialness of frame of reference.
We see that the stone has a tendency to move in a circle and experiences a force which has a center at the beginning of the string — perhaps held by a kid. This is called as a non-uniform or uniform circular motion depending on whether the state of inertia of the stone itself is constant or not.
Again by that we mean whether the stone is accelerating in the tangential direction to the string’s motion, — the circle that is, or not. In any case its always accelerating in the central direction, also called the radial direction.
Note that the above statement regarding state of inertia was made in reference to the tangential direction, where the speed changes in the case of non-uniform circular motion, and it does not change in case of uniform circular motion.
In the radial direction, the speed never changes, but there is a radial component of acceleration in this direction which causes the object to traverse a circle, but not change its speed.
Any speed change in the non-uniform circular motion comes from additional tangential acceleration.
Its a basic vector concept that an acceleration which is perpendicular to direction of motion can only change the direction, which is necessarily in a circular path.
The other exclusive possibility of having the acceleration along the direction of motion changes the speed — either it decreases or increases the speed.
The most general case is when there are both perpendicular and longitudinal components of the acceleration vector, in that case both the speed and direction of the motion change.
Note that perpendicular is synonymous with radial here and longitudinal ( or along the motion ) is synonymous with tangential here. Both are described wrt the direction of motion of an object under consideration, here the mass attached to the string is the object of motion.

So to simplify, the stone will always have a radial, central or perpendicular acceleration for it to be able to move in a circle. This acceleration is called as centripetal acceleration as long as we are observing it from a place which has a zero or unchanging velocity.
But in addition it might have a tangential or along the motion acceleration — this speeds up or slows down the stone, but the radial acceleration, keeps the stone in circle.
Our situation one is when we are observing the whole string-stone motion from a place, that is not accelerated, even if the stone itself has either one or two kinds of acceleration — namely radial and tangential, from this place of observation.
B. the situation two; this situation shows up when the place from where we are observing is in itself accelerating. One example is a dragonfly sitting on that stone.
What would the dragonfly experience?
The dragonfly and in retrospect the stone and the string and anything in contact with these things will simply not experience what Newton’s laws would predict. As I emphasized the 3 factors, additional pseudo effects — pseudo in considering Newton’s unmodified laws as sacrosanct, will be experienced by them.
We can take another example, lets say a tiny ball is lying on a circular disc which is rotating. The above 3 factors say the ball will experience a force — a pseudo or fictitious force, which is equal and opposite to the acceleration of the disc, multiplied by the ball’s own mass.
That’s what the dragonfly will also experience along with the stone. They experience an outward tendency to fly off and will do so if the string is cut off. That is, while from a frame which is not moving such as our observing a kid to rotating the string, the stone has a radial inward force acting on it, called as centripetal force, the stone itself has a radially outward — in the instant, force acting on it, as experienced by it.
Because we have tied it to the string we don’t seem to notice it. If off topic analogies do not bother you, this is like people in democracy are tied to constitution and laws, so they can’t speak much.
That’s because the stone is accelerating keeping its own speed constant or not, notwithstanding. This outward force actually does not exist, but the effect is experienced by the stone as its experiencing such a force from a frame that’s accelerating. This force is called as a centrifugal force.
Therefore it turns out for reasons of consistency that the centripetal force is equal and opposite to the centrifugal force. But they are not action-and-reaction pair of Newton’s third law.
Centrifugal force is the radial outward force due to measurements being carried out in an accelerated frame where the accelerated frame is the one associated with the centripetal force — in our specific examples, in consequence they are equal and opposite.
The pseudo force is always equal and opposite to the mass times the acceleration of the frame. Hence centrifugal and centripetal forces are equal and opposite but they act on the same object as seen from different frames of references.
Hence these are not two different forces acting at the same instant, but rather an exclusive pair of forces as per the frame of reference of observation.
But this is the case when the objects of motion that we are considering, the stone, the dragonfly or the ball on the disc, are not moving themselves in the accelerated frame in which we are considering them.
They will experience another pseudo effect if they were to have a state of inertia that’s changing. That is if these 3 objects are moving in an accelerated frame an additional very small force would be experienced by them due to their own velocity and not just due to the velocity — or rather acceleration, of the frame of reference.
So trivia; there are two kinds of pseudo force.
Centrifugal force is a pseudo force. It emanates from the fact that the frame of reference has acceleration. Centrifugal force is in the exact opposite direction of the centripetal force, it is the only pseudo force acting on the object if the object itself is stationary.
The Coriolis force is also pseudo force. It emanates from the fact that the object in an accelerated frame is not stationary but has a velocity. It is not the only pseudo force acting on the object if the object is not stationary because now there is also a centrifugal force in addition to the Coriolis force.
The suitcase rolling in a turning bus, will not only experience the force that we experience but also another small additional force due to the fact that its not stationary. For this reason gradually it will roll faster.
Because our earth is spinning about itself and also because its revolving about the sun, stationary object and moving objects will experience different pseudo forces. In addition to centrifugal force coming due to acceleration of the earth — earth-spin and rotation around sun, the moving objects will also experience an additional force, called as Coriolis force, this force is two orders of magnitude smaller than the centrifugal force.
For that reason flights and rockets will be slightly off than their non-inertial trajectories, due to the fact that they are already moving in the rotating earth frame. It will be of the 1 % level — that is two orders of magnitude smaller than the pseudo force already experienced due to rotation of frame of reference.
One can check for exact formula for Coriolis force; ωv, where ω gives angular rate at which the frame is rotating and v is the object’s own velocity. Centrifugal force is 
This is perhaps the reason most people do not talk about the Coriolis force, but its an important pseudo force concept. We also need to check the veracity of the last equations we wrote. But for now, it seems the blog is quite long. If there is a suggestion or feedback feel free to comment or email. You can also share the article for anyone’s use.
The article is now 5.34 K worded. So thank you for reading and adios.

Leave a comment