
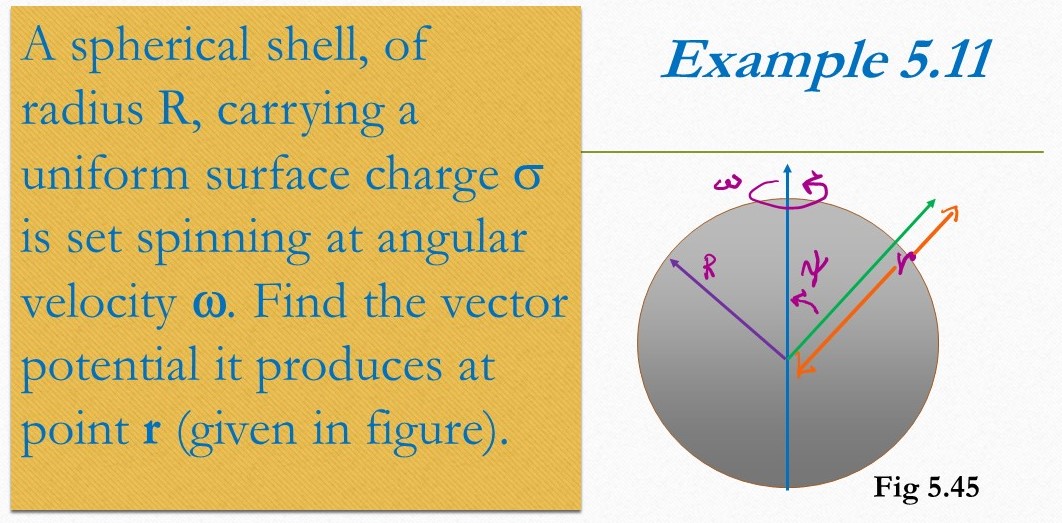
Example 5.11 (Griffith Electrodynamics)
Today we will solve the problem of finding magnetic vector potential of a rotating, uniformly charged spherical shell. We won’t discuss the general idea behind the vector potential (how it follows from Helmholtz theorem, and gauge freedom etc) and how its defined. That will be part of a conceptual lecture and will be available when the same would be created. The offline version is available, but the web version will call for a special priority to be assigned.
In-fact this is already discussed in an advanced lecture of electromagnetic theory. You might wanna have a look if perfection is your forte. The linked lecture is comprehensive but isn’t as lucid as the present one. But I suggest you have a look either before or after the current one.
( Helmholtz theorem ) Go to read a formal discourse on vector and scalar potential
The problem is quite well defined. We just need to follow the straightforward method of implementing the basic definitions and carrying out the required steps. But we need to be mindful of the framework in which we need to accomplish these steps.
The framework I am talking about here is the coordinate system we need to set in order to solve the problem. Notice that the problem has been stated in the spherical coordinate system (which has been discussed couple of times in this website. I am appending the figure below). But we need not worry about all the aspects of this coordinate system, we will only pick on those which are immediately applicable to our problem.
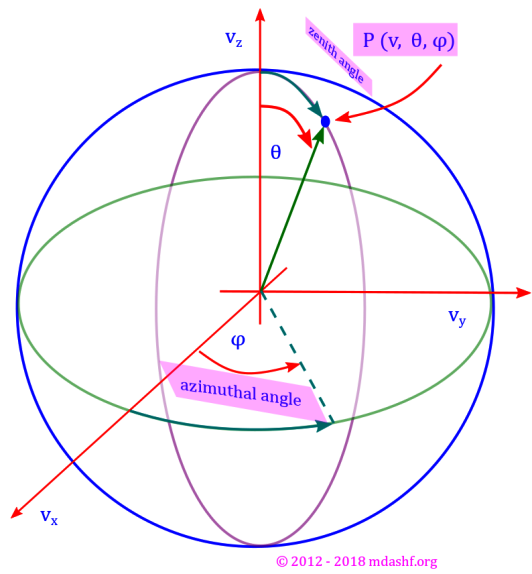
While this choice of the system where the polar axis (z-axis, wrt which the polar angle θ is measured in a r, θ, φ spherical coordinate system) coincides with the angular velocity vector ω is very natural, it isn’t the most convenient for carrying out the ensuing integral for the vector potential A.
It would be easier if we re-frame our coordinate system from whats given, in the problem, to one, where our reference point given by position vector r, lies along the polar axis but angular velocity vector ω is tilted with respect to the polar axis (and the reference vector r) at an angle ψ. We can also reorient our x-axis so that ω is co-planar with xz-plane, i.e. ω entirely lies in this plane and has no y-component.

In doing these tricks we are not at any loss of generality while making our calculations far more easier than if we do not follow these tricks.
Now we would like to remember the most basic expressions for the magnetic vector potential, which define the same. But before that lets revitalize our memory about the basics of potential of two types, the scalar electric potential and the vector magnetic potential.
In order for conceptual clarity and easy memorization we can draw parallels between the electric (scalar) potential and magnetic (vector) potential although one is a scalar and one a vector.
We can define an electrostatic potential Φ because curl of the electric field E is zero. In that case electric field is simply given as directional derivative or gradient of the scalar potential Φ and inversely the potential Φ is the line integral of the electric field E.
In-fact this is a result of the Helmholtz theorem.
( Helmholtz theorem ) Go to read a formal discourse on vector and scalar potential

For a point charge the potential is given as kQ/r. Potential for a continuous distribution of charges is accordingly dependent upon a linear (λ), surface(σ) or volume (ρ) charge density. Thus we need an integration over linear (with dQ = λdl), surface (with dQ = σda) or volume (with dQ = ρdτ) region respectively. The location variables for a source (charge or current) are denoted by the primed vectors or primed length-dimensions.
The magnitude of the electric field E is accordingly given, for a point charge, as the derivative of the potential (in general a negative potential gradient) by kQ/r2. Also, the field (or the negative gradient of the given potential kQ/r) is directed along the vector from the tip of the source’s position vector to the tip of the position vector of the reference point.
Source’s position vector r’: the position where the charge or current are located whose field we are computing. Reference vector r: the position where field or potential is to be determined. This difference vector or relative vector r – r’ is known as separation vector and its denoted by the curly-r vector.

Now lets see how we can make an analogy for the magnetic case, from the above. The value of k in case of electrostatics is given by k = 1/4πε0. Correspondingly the k (km) for magnetic case is given by km = μ0/4π.
Similarly the source current elements are to be replaced in place of source charge elements (λdl, σda, ρdτ) in the expression for magnetic potential. Remember that now instead of charge Q we have a variable Qv (v is velocity vector of the moving charge that produces the magnetic field) for the magnetic case. Qv is a current element (current times infinitesimal length) and its a vector in the same direction as that of v or dl. (v = dl/dt)
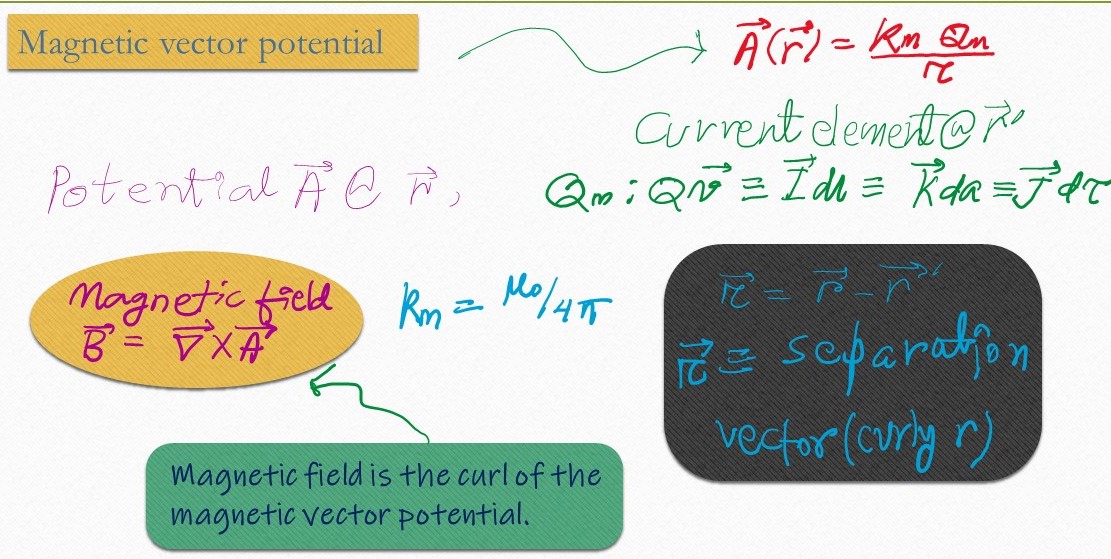
Accordingly Qv can also be written as Idl (=Idl), Kda or Jdτ. The linear current I is thus a vector and it has the same direction as dl or v. In-fact all the 5: v, dl, I, K, J are vectors with the same direction, the direction of the charge flow. Usually the vector potential A also has the same direction as linear current I (or all the other vectors whose direction is same as that of current).
Linear current is defined as, I =dQ/dt, vector I = λv, or Idl = (dQ/dt)dl.
Also note in the following, two alternate definition of the surface current density vector (K) and volume current density vector (J) and keep them in mind and how they appear in different formulas. Quite likely they will give a lot of head ache. If you remember the concepts (which I will tell you as I have already had my share of head-ache) the headache and confusion will subside.
So here are the definitions and concepts to avoid confusion.
A. Surface density of current which is a vector (K) is defined as the linear current vector I per unit length, length being perpendicular to the current direction. Hence a ⊥ sign in its definition: K=dI/dl⊥. The alternative definition is K = σv. (surface charge density into velocity vector of charge).
Concept to avoid confusion: K is integrated wrt length only if you want to find I, the current. (because of definition: K=dI/dl⊥). But if you want to find out vector potential A or magnetic field B you have to integrate K over area (obviously the area where source of current K is distributed, the primed area). So you will see the expressions Kda’ in integrations for A and B. But for calculating I, or I_enclosed eg which appears in Ampere’s law, you need to integrate Kdl⊥.
B. Volume density of current which is a vector (J) is defined as the linear current vector I per unit area, area being perpendicular to the current direction. Hence a ⊥ sign in its definition: J=dI/da⊥. The alternative definition is J = ρv. (volume charge density into velocity vector of charge).
Concept to avoid confusion: J is integrated wrt area only if you want to find I, the current. (because of definition: J=dI/da⊥). But if you want to find out vector potential A or magnetic field B you have to integrate J over volume (obviously the volume where source of current J is distributed, the primed volume). So you will see the expressions Jdτ’ in integrations for obtaining A and B. But for calculating I, or I_enclosed eg which appears in Ampere’s law, you need to integrate Jda⊥.

So far so good we understand how just by remembering simple expression for electrostatic potential (kQ/r) we can not only obtain electric field E (by vector-differentiating kQ/r we get magnitude kQ/r2 and direction along curly-r) but also by remembering few definition of some basic parameters we can draw a parallel between electrostatics and magnetostatics case and obtain the general expression for the magnetic vector potential.
But additionally the vector potential satisfies interesting properties. It satisfies in particular two properties also satisfied by the magnetic field itself.
A. The divergence of vector potential is zero.
In-fact if it is not zero we can always find another vector potential whose divergence must be zero. Vector potential is not unique. There are numerous vector potentials corresponding to the same magnetic field.
B. Not only the magnetic field, but also with suitable correspondence made for the vector potential, the latter also satisfies its own Ampere’s law.
In-fact our next problem to solve will be an application of this analogy between magnetic field and its vector potential. They both satisfy the Ampere’s law, on their own.

Like we obtained our electrostatic field E from corresponding scalar potential Φ by taking (negative of) its gradient, we can obtain our magnetostatic field B by taking the curl of the magnetic vector potential A, ie. B = curl (A).

So here are our most basic and general definition for vector potential depending on the geometry of the source of current being linear, surface or volume.
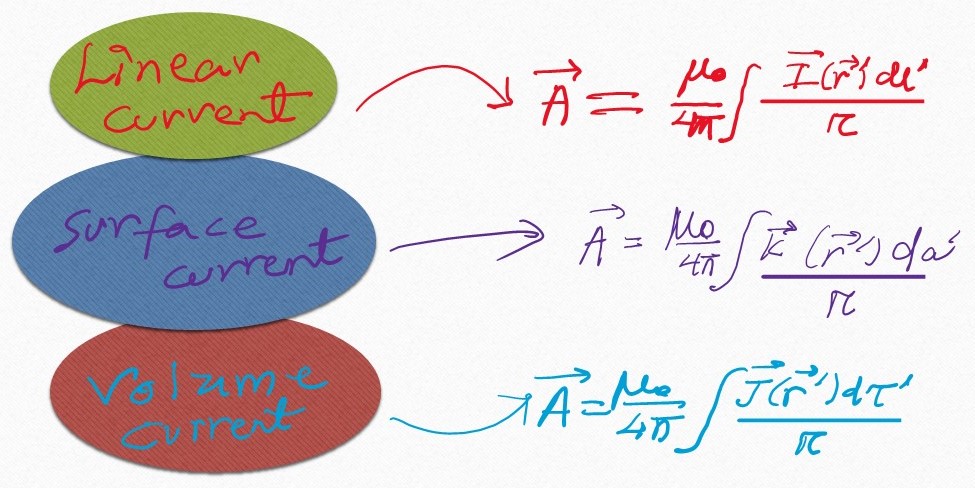
eg by taking the curl of the last expression for potential A, given above (for volume density of current J) one can show that one obtains the Biot-Savart law for the expression of magnetic field for the same current density J.
In our problem at hand, we have a charge and current distribution which is two dimensional, namely surface of the sphere. Accordingly we need to chose the following expression for solving for vector potential.

Now it is our aim to find the vector potential from the above general expression for the same. All we have to do is cast K, da’ and curly-r magnitude in terms of given parameters.
The surface element da’ is simply product of two lengths, one along the φ’ direction: Rdφ’, and the other along the θ’ direction: Rsinθ’dθ’.
K is by definition σv where σ is a given parameter but v is not. In-fact we need to further cast v in terms of known parameters. In a rigid body rotation (represented by the rotating shell here) the velocity vector and angular velocity vector are related by the following expression: v = ω x r’.
In our new coordinate system (r along polar axis): ω = (ω sinψ, 0, ω cosψ) and r’ = (R sinθ’cosφ’, R sinθ’sinφ’, R cosθ’ ). Since we know the components of ω and r’, the cross product is evaluated either as a determinant (as given below) or one can practice the following method to do so, for an alternative quick result.
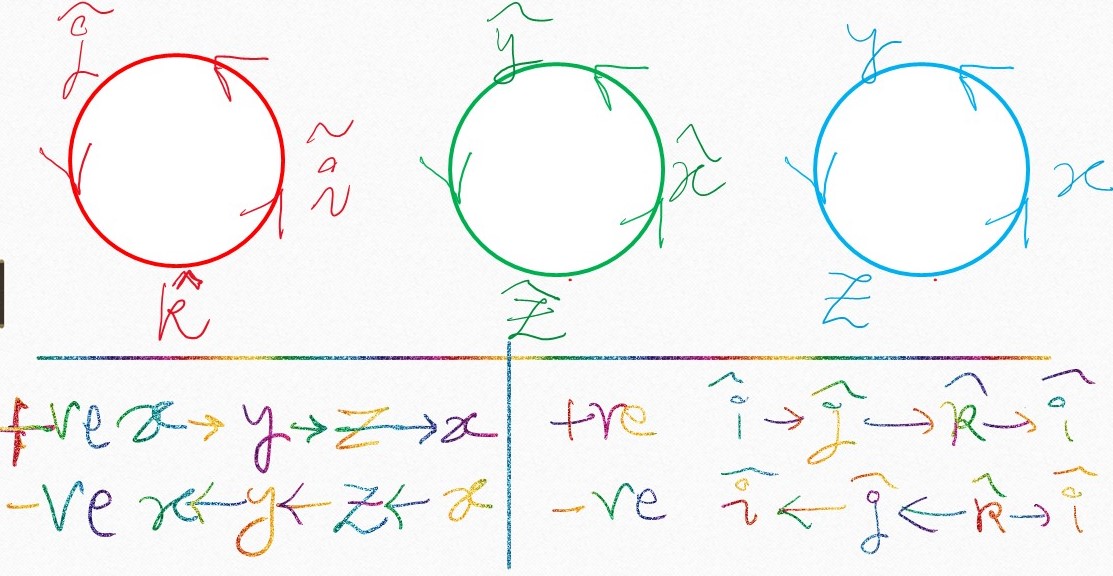
One writes for x-component of cross product of vectors A and B x-cap(AyBz – BzAy). The other components follow a cyclic order which is explained in the following schematic. So y-component is y-cap(AzBx – BxAz) and z-component is z-cap(AxBy – ByAx). Here A = ω and B = r’.
Where x-cap = i-cap, y-cap = j-cap and z-cap = k-cap; the constant Cartesian coordinate system unit vectors. Its really easy, one simply writes eg x(yz). Where first x is unit vector (start with x-cap or i-cap) Inside () the order is reversed with a minus sign, so the total is x(yz-zy). In the first term inside () y is y-component of first vector and z is z-component of 2nd vector. In the reverse order z is the z-component of first vector and y is y-component of 2nd vector.
The result of the above intended exercise is: vx = -Rω cosψ sinθ‘ sinφ’, vy = Rω (cosψ sinθ‘ cosφ’ – sinψ cosθ’), vz = Rω sinψ sinθ’ sinφ’.
Also curly-r, the magnitude of the separation vector (distance between current element and point where potential A and field B are to be determined) can be determined in the usual manner, namely by cosine law. Consider the vectors r’, r and curly-r. curly-r = r–r’ so |curly-r|= sqrt [(r–r’) . (r–r’)] = sqrt [r2 + r’2– 2r.r’] by rules of dot product. On the surface of the shell r’2 = R2 and r.r’ = R r cos(θ’).
Thus |curly-r|= sqrt [R2 + r2 – 2 R r cos(θ’)].

As an alternative we can evaluate the cross product by the determinant method by writing out ω = (ω sinψ, 0, ω) and r’ = (R cosφ’, R sinθ’sinφ’, R cosθ’) so that the basic rules of determinant gives: vx = -Rω cosψ sinθ’ sinφ’, vy = Rω (cosψ sinθ’ cosφ’ – sinψ cosθ’), vz = Rω sinψ sinθ’ sinφ’.

So with K = σv we obtain: Kx = -Rωσ cosψ sinθ‘ sinφ’, Ky = Rωσ (cosψ sinθ‘ cosφ’ – sinψ cosθ’), Kz = Rωσ sinψ sinθ’ sinφ’. We know the following integrals are zero, thus the only term that survive in K, is in Ky: -Rω sinψ cosθ’. Accordingly we obtain the following integral expression for our vector potential.

Now we need to go a step further (than the textbook) in order to explicitly find the solution given in the text. Let us introduce a new variable v = R 2 + r 2 – 2 Rru. From this by differentiating: -2Rrudu=dv, so our integral changes its form. Finally we get the expression for the integral, given below.
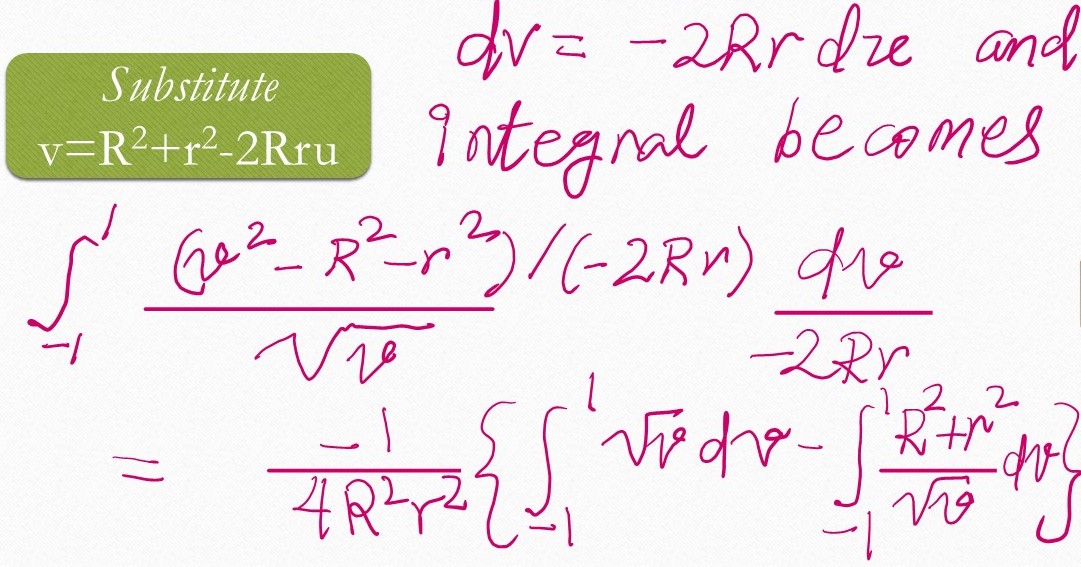
With our new variable v, we obtained two integrations each of which are basic integrations (integrations of simple 1 dimensional power functions). Their solutions are then converted into definite integrals by using the value for u = ± 1 which corresponds to v1/2 = |R-r| and (R+r). Accordingly we have the final expression as depicted below.

Now we will be concerned about points inside of the shell (r<R) and outside of it (r>R).
The final expression we obtained for the integral which is to be multiplied to a constant to get the vector potential, greatly simplifies for these two regions. For R>r (inside) the integral becomes 2r/3R2 and for R<r (outside) it becomes 2R/3r2. Also the cross product ω x r = -ωr sin ψ y-cap. (see the 2nd diagram of this article).
This greatly reduces the final form of the vector potential to the following.

This is a coordinate independent form. (although we worked it out in the spherical polar coordinate system).
Now we can revert to our original coordinates that we suggested as a natural system for our problem. We don’t need much labor. We just need to remember that in that system cross product of unit vector along polar axis (z-cap) and unit vector along radial direction (r-cap) is unit vector along azimuthal dimension (φ-cap).
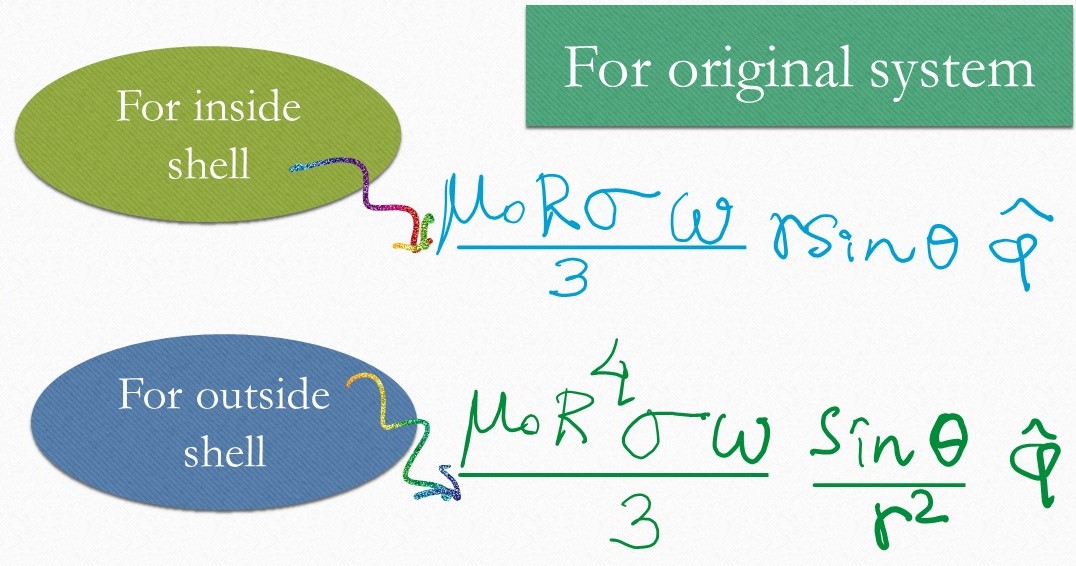
So ω x r = ωr sin θ φ-cap. So we have the following expression for spherical polar coordinates (from their coordinate independent forms above). As noted earlier θ is same as ψ.
Now we will find the magnetic field inside of the shell from the vector potential inside of the shell. We know that the magnetic field is curl of the vector potential and we use curl in spherical coordinate system. This is simpler because the vector potential has only an azimuthal component (the polar and radial components are zero).
We will write only the relevant components of the curl in the spherical coordinate system. Using only very basic properties of the spherical coordinate system and given information in the problem we see that the magnetic field of a uniform charge distribution on a spherical shell inside of it is uniform, that is constant.

Here is the magnetic field inside the shell.


Leave a comment