This article is 3301 worded
Optics series, lecture — VI
This lecture was delivered on 7th February 2017 ( 1.5 hours )
( All Optics series lectures ) Read other available lectures in optics series
“Application of matrix method to thick lenses”
Application of matrix method to thick lens: cardinal points, thick and thin lens matrices, unit and nodal planes and more …
Topics covered in this lecture
A. Cardinal points
B. Thick lens equation and matrix for thick lens
C. System matrix for thin lens
D. Unit and Nodal planes
E. Matrix for a system of 2 thin lenses
Background
In our last lecture ( lecture V ) we introduced the matrix methods for optical systems. I recommend you read that lecture, preferably before the current one.
( matrix formulation in geometrical optics ) Read previous lecture ( lecture V ) on matrix method
Our previous studies of the optical systems were based on two premises.
a. we assumed a paraxial system
b. we assumed that our lenses are thin.
- Paraxial system
- We assumed a paraxial system. This means we employed a first order optical theory. Read more about paraxial systems and what is first order optical theory in the two lectures linked below. The paraxial assumptions are fraught with various types of aberrations. We studied about aberrations in quite detail in two lectures.
- Thin lenses
- We assumed that our lenses are thin. This we did for simplicity. In physics when we assume a simple situation, we are not evading the actual complexity of the situation, we are just postponing this to the happy hour, howsoever one defines it.
( Details about primary aberration ) Read details about primary or Seidel aberration
Happy Hours. Some people go by the Friday happy hour rule. It gives a good substratum on which a disposition can be carried out. Later one develops the nuances and fits it into the substratum and if things are carried out with caution and skill one gets a very effective overview of the pedagogy.
Let us now delve into the complexity of the optical system, as a next step from its simple substratum of a thin lens. Our previous analyses especially the ones we applied on the introductory lecture of matrix method ( lecture V ) needs to be modified for application to optical systems when we consider thick lenses.
In our last lecture, lecture — V, we studied the method of matrices in understanding optical ray tracing. Let us now apply this method to the case of the thick lens and see what power it unleashes.
( lecture – V: matrix formulation ) Read previous lecture on matrix method
Thick lens
I. Cardinal points
A thick lens can be considered to be an equivalent of multiple thin lenses.
Let us draw two suitable thick lens diagrams.


Let’s first discuss the parameters of the thick lens system.
- First focal point or object focus
- The first focal point ( FFP ) or object focus is denoted as
. Check the first diagram above: rays emerging from
- Second focal point or image focus
- The second focal point ( SFP ) or image focus is denoted as
. Check the second diagram above: if rays incident on the first spherical surface are parallel, then they meet at
- The forward focal length
- The forward focal length ( FFL ) is the distance between the object focus
.
- The backward focal length, B.F.L.
- The backward focal length ( BFL ) is the distance between the image focus
.
- Image surfaces
- When rays from the object and image focuses (
- The principal planes
- These planes are tangent to the surface which is created when rays from
and
.
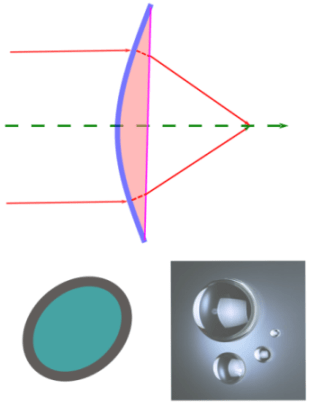
- Nodal points
- Any ray going through the optical center emerges parallel to the incident ray — see the diagram below. When the incident ray and the emergent rays are extrapolated they meet at points
and
on the optical axis.
The six points that we just discussed, the focal points 





The length between 




II. Thick lens equations
Thick lenses are equivalent to two spherical refracting surfaces separated by a distance 





We would also have after a detailed considerations of the geometry the following relation which is valid for a thick lens. Alternatively we will derive the following result from our elegant and powerful matrix method, that we learned in last lecture, lecture — V:
![\boxed{\frac{1}{f}= (n_l -1) \Big [ \frac{1}{R_1}-\frac{1}{R_2}+\frac{(n_l -1)d_l}{n_lR_1R_2}\Big]}](https://s0.wp.com/latex.php?latex=%5Cboxed%7B%5Cfrac%7B1%7D%7Bf%7D%3D+%28n_l+-1%29+%5CBig+%5B+%5Cfrac%7B1%7D%7BR_1%7D-%5Cfrac%7B1%7D%7BR_2%7D%2B%5Cfrac%7B%28n_l+-1%29d_l%7D%7Bn_lR_1R_2%7D%5CBig%5D%7D+&bg=ffffff&fg=1e90ff&s=0&c=20201002)
III. Setting matrix equation for thick lens
1. System matrix for thick lens
Its a cupcake to realize how to draw the paraxial ray diagram for a thick lens system, now that we understood in good detail how we can do it for a general traversal of the light ray in terms of translation and refraction, in lecture V, already linked twice. ( this will be the last time I promise )
( lecture – V: matrix formulation ) Read previous lecture on matrix method
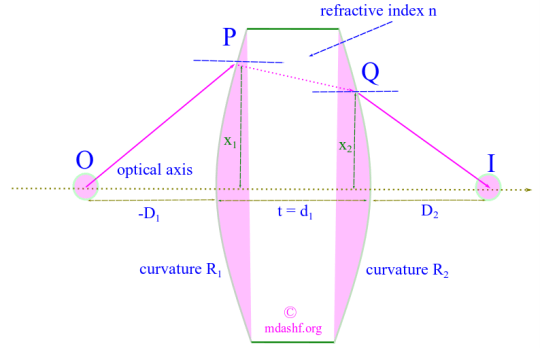
So lets just do that. It will be easier to talk as analytical a topic as geometrical optics, when we have a geometrical diagram for it. Lets therefore draw one.

Let the ray incident on the lens, strike the first surface at P with coordinates 



As we can easily see the ray undergoes two refractions — one at P and one at Q, and one translation through thickness 

Accordingly:

With 
![\boxed{S=\begin{pmatrix} b & -a\\ -d & c \end{pmatrix} = \begin{pmatrix} 1- \frac{P_2t}{n}&-P_1-P_2 \big[ 1-\frac {tP_1}{n} \big ] \\ \frac{t}{n} & 1- \frac{t}{n}P_1\end{pmatrix}}](https://s0.wp.com/latex.php?latex=%5Cboxed%7BS%3D%5Cbegin%7Bpmatrix%7D+b+%26+-a%5C%5C+-d+%26+c+%5Cend%7Bpmatrix%7D+%3D+%5Cbegin%7Bpmatrix%7D+1-+%5Cfrac%7BP_2t%7D%7Bn%7D%26-P_1-P_2+%5Cbig%5B+1-%5Cfrac+%7BtP_1%7D%7Bn%7D+%5Cbig+%5D+%5C%5C+%5Cfrac%7Bt%7D%7Bn%7D+%26+1-+%5Cfrac%7Bt%7D%7Bn%7DP_1%5Cend%7Bpmatrix%7D%7D&bg=ffffff&fg=1e90ff&s=0&c=20201002)
2. System matrix for thin lens as a limiting case of thick lens
For a thin lens we can safely assume the limiting thick lens whose thickness goes to zero: 
We obtain:

So, we have: 
Now if we have 

So we have 
This implies:

or
![\frac{1}{D_2} - \frac{1}{D_1}= \frac{1}{f}, with \,\,\, f = \frac{1}{P_1 + P_2 }= \Big [ (n-1)\Big (\frac {1}{R_1}-\frac {1}{R_2} \Big ) \Big ]^{-1}](https://s0.wp.com/latex.php?latex=%5Cfrac%7B1%7D%7BD_2%7D+-+%5Cfrac%7B1%7D%7BD_1%7D%3D+%5Cfrac%7B1%7D%7Bf%7D%2C+with+%5C%2C%5C%2C%5C%2C+f+%3D+%5Cfrac%7B1%7D%7BP_1+%2B+P_2+%7D%3D+%5CBig+%5B+%28n-1%29%5CBig+%28%5Cfrac+%7B1%7D%7BR_1%7D-%5Cfrac+%7B1%7D%7BR_2%7D+%5CBig+%29+%5CBig+%5D%5E%7B-1%7D&bg=ffffff&fg=1e90ff&s=0&c=20201002)
Thus we see that the element 

Also we realize that the power of matrix method is such that we obtain the thin lens equation without even realizing, we did.

Its so effortless.
3. Unit and nodal planes of thick lens from system matrix elements
The elements of the system matrix for a thick lens were obtained in the penultimate section. Lets open the system matrix 

A. Unit planes
The locus of conjugate points — object and image that is, for which linear magnification is unity ( = 1 ) are called as unit planes. These are also the principal planes that we defined at the beginning of this article, while discussing cardinal points.
A paraxial ray emanating from unit plane in object space will emerge at the same height in image space in the other unit plane. If 

We note that we would obtain the above result after an equally enlightening analysis of a thick lens system, as we did here and the analysis in lecture — V.
Earlier I intended this as a homework for the serious student, but below I have worked this out, nonetheless one who works this out himself/herself will no doubt reward himself/herself conceptually and spiritually.
Here is how to obtain the above result. Multiply the system matrix that we obtained for thick lens, namely 




We would obtain:

Note that all that we did here is from our original system matrix
But before incidence at point P — that is: the first surface, the ray had traversed from the object point — this is given by matrix 

So including these two additional coordinates changed the old system matrix
a. Condition — i: Axial object points produce axial image points.
That is: 

This was one of the elements of the matrix we just obtained above, this is the beauty of the matrix method, we obtain important results in terms of the elements of the system matrix. This implies, for the image plane, we obtain the equation:

Now we apply the second condition.
b. Condition — ii: If our objects points are not axial we get: 

This gives us what we set out to prove, with the recognition that M = 1 in our case, because we are fixed to the unit planes, the ones that have linear magnification by definition, namely:
and we have a general result:
Now the distances of the unit planes — the primary plane to vertex 


We have:

If S is the distance of the object plane from first unit plane and v is the distance of the image plane from second unit plane then; 


So we have: 
In section — II for thick lens we saw that instead of a we had the inverse of focal length — the left hand side is equal if we consider the minus sign for sign convention. So the matrix element again gives the inverse of focal length, as in case of thin lens, which we had seen before. Thus 
Thus for thick lens we have the locations of the unit planes: ![\boxed{d_{u1}=\frac{t}{n}{P_2} {\Big [P_1+P_2\Big ( 1-\frac{t}{n}P_1 \Big) \Big]}^{-1} }](https://s0.wp.com/latex.php?latex=%5Cboxed%7Bd_%7Bu1%7D%3D%5Cfrac%7Bt%7D%7Bn%7D%7BP_2%7D+%7B%5CBig+%5BP_1%2BP_2%5CBig+%28+1-%5Cfrac%7Bt%7D%7Bn%7DP_1+%5CBig%29+%5CBig%5D%7D%5E%7B-1%7D+%7D&bg=ffffff&fg=1e90ff&s=0&c=20201002)
![\boxed{d_{u2}=-\frac{t}{n}{P_1}{\Big [P_1+P_2\Big ( 1-\frac{t}{n}P_1 \Big) \Big]}^{-1}}](https://s0.wp.com/latex.php?latex=%5Cboxed%7Bd_%7Bu2%7D%3D-%5Cfrac%7Bt%7D%7Bn%7D%7BP_1%7D%7B%5CBig+%5BP_1%2BP_2%5CBig+%28+1-%5Cfrac%7Bt%7D%7Bn%7DP_1+%5CBig%29+%5CBig%5D%7D%5E%7B-1%7D%7D&bg=ffffff&fg=1e90ff&s=0&c=20201002)
For symmetric thick-lens: 

![\boxed{\frac{1}{f}=a = P_1 + P_2 \Big ( 1- \frac{t}{n}P_1\Big) =(n-1)\Bigg [ \frac{1}{R_1}-\frac{1}{R_2}+\frac{(n-1)t}{nR_1R_2}\Bigg]}](https://s0.wp.com/latex.php?latex=%5Cboxed%7B%5Cfrac%7B1%7D%7Bf%7D%3Da+%3D+P_1+%2B+P_2+%5CBig+%28+1-+%5Cfrac%7Bt%7D%7Bn%7DP_1%5CBig%29%C2%A0%3D%28n-1%29%5CBigg+%5B+%5Cfrac%7B1%7D%7BR_1%7D-%5Cfrac%7B1%7D%7BR_2%7D%2B%5Cfrac%7B%28n-1%29t%7D%7BnR_1R_2%7D%5CBigg%5D%7D&bg=ffffff&fg=1e90ff&s=0&c=20201002)
This is exactly what we had stated in the beginning of our article in section — II. We see that we can obtain the fundamental equations of thick lens and thin lens almost effortlessly if we are to follow the magic of matrix method.
B. Nodal planes
We apply similar reasoning to obtain the nodal plane distances. By using our condition — ii
we see that;

this is because the media on both sides of the lens is air and also the lens is symmetric. We had stated this earlier, now we have evidence.
Similarly second nodal plane is same as second unit plane. So:

4. System of two thin lenses from system matrix elements of thick lens
If two thin lenses of focal lengths 

We have, 


This is the result we had used in studying achromatic doublets, when we studied chromatic aberrations.
( Achromatic doublets ) Read about achromatic doublets in the linked lecture
Also the unit planes are located at 
5. System of two thin lenses: Ramsden and Huygens’s eyepieces
This is merely an application of section – 4 above. I leave this to your good sense for trying this as a homework problem and get some conceptual clarity on the differences between the two types of eye pieces.

Leave a comment