Category: optics
-
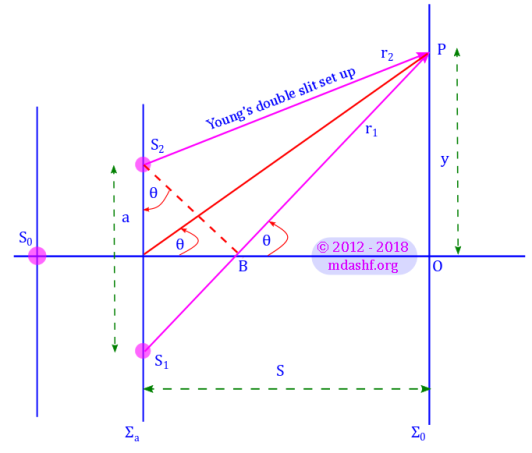
Young’s double slit experiment
Optics Series Lecture, Lecture – IX. “Young’s Double Slit Experiment. Coherent Sources and Conditions of Interference” This lecture was delivered on 14th February in a lecture session of 1 and 1/2 hours. This lecture was delivered to Physics elective students. At a later date this was delivered as a lecture to honors students as well. The…
-
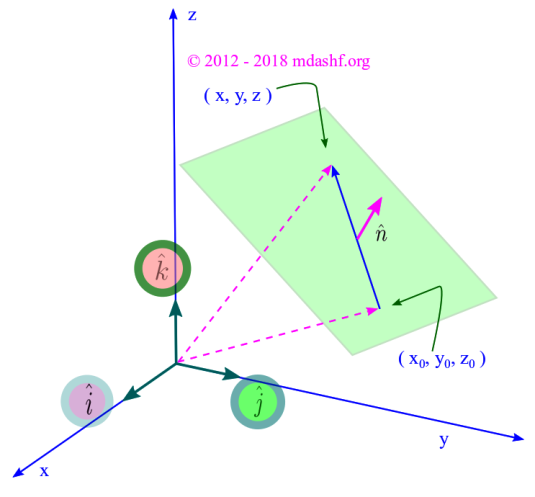
Harmonic plane waves
Optics Series Lecture, Lecture – VIII. “Harmonic Plane Waves” This lecture ( 1.5 hours ) was delivered on 13th February 2017 to honors students In our last lecture ( lecture — VII ) we began by discussing what are electromagnetic waves. We also discussed in good detail what are harmonic waves. Harmonic waves are those waves…
-
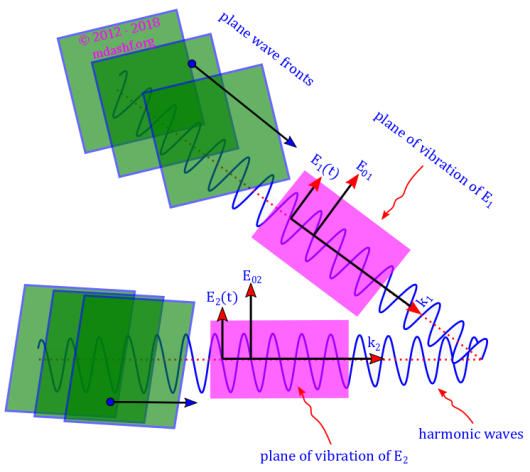
Interference of two plane harmonic waves
Optics Series Lecture, Lecture – VII. “Conditions of interference, Interference of two plane harmonic waves.” This lecture was delivered on 7th February in a lecture session of 1 and 1/2 hours. This lecture was delivered to Physics elective students but intended as a lecture towards Honors students at a later date. Electromagnetic Waves. Light is…
-
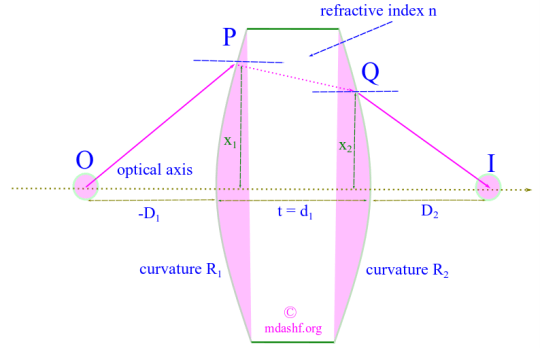
Application of matrix method to thick lens
Optics Series Lecture, Lecture — VI All Optics series articles: https://mdashf.org/category/optics/. Application of Matrix Method to Thick Lenses Topics covered in this lecture A. Cardinal points B. Thick lens equation and matrix for thick lens C. System matrix for thin lens D. Unit and Nodal planes E. Matrix for a system of 2 thin lenses Our previous studies of…
-
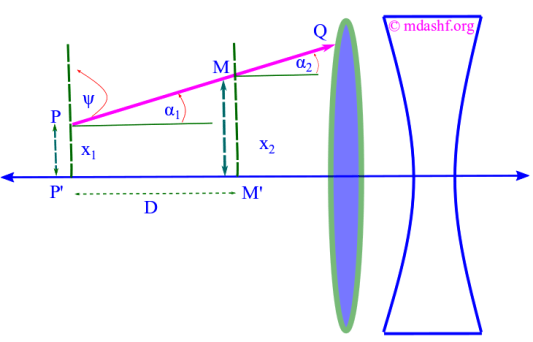
Matrix formulation in geometrical optics
Topics covered in this lecture Ray tracing a. Translation matrix b. Refraction matrix c. System matrix In this lecture, we will discuss about one of the most interesting and powerful methods in Geometrical Optics. As we have discussed here (https://mdashf.org/2017/02/25/fermats-principle-a-lecture-in-optics/), geometrical optics is that segment of optics in which we are limited to a situation…
